📄 Characterizing and Optimizing the Spatial Kernel of Multi Resolution Hash Encodings
#3D重建 #哈希编码 #神经场 #计算机图形学
✅ 7.0/10 | 前25% | #3D重建 | #哈希编码 | #神经场 #计算机图形学
学术质量 6.0/7 | 选题价值 1.0/2 | 复现加成 0 | 置信度 高
👥 作者与机构
- 第一作者:Tianxiang Dai (斯坦福大学电气工程系)
- 通讯作者:Jonathan Fan (斯坦福大学电气工程系)
- 作者列表:Tianxiang Dai (斯坦福大学电气工程系), Jonathan Fan* (斯坦福大学电气工程系)
💡 毒舌点评
这篇论文的亮点在于用物理光学里的“点扩散函数”概念,给多分辨率哈希编码(Instant-NGP的核心)做了一次彻底的“体检”,发现其默认设置下不仅模糊(有效分辨率由平均分辨率决定而非最细分辨率)而且方向敏感(各向异性),并据此提出了零成本改进的“旋转哈希编码”。短板在于,在标准的3D重建基准测试上,这种改进带来的收益相当微弱,几乎在统计噪声范围内,让人怀疑其宣称的普适优势在常见场景下是否真的那么关键。
🔗 开源详情
- 代码:论文中未提及代码链接或开源计划。
- 模型权重:未提及。
- 数据集:使用了公开的数据集(Synthetic NeRF,标准SDF网格,三张高分辨率图像),但论文中未提供其额外处理或获取的专门链接。
- Demo:未提供。
- 复现材料:论文在附录中提供了部分实验细节(如2D图像回归的超参数、3D实验配置),以及推导过程,但不足以完全复现所有核心实验(尤其是PSF测量框架)。
- 论文中引用的开源项目:论文中提及了基于Instant-NGP框架进行实现。
📌 核心摘要
- 问题:多分辨率哈希编码(MHE)是Instant Neural Graphics Primitives的核心,但其空间行为缺乏从物理系统视角的严格分析,导致其超参数选择依赖经验启发式规则。
- 方法核心:本文引入点扩散函数(PSF)作为分析工具,将优化MHE建模为对一个理想点源的响应,从而量化编码的空间分辨率和保真度。
- 创新之处:与已有方法相比,本文首次推导了MHE的无碰撞PSF的封闭形式近似,揭示了其固有的各向异性和对数空间轮廓;更重要的是,通过理论和实验揭示了优化动态(如频谱偏差)导致的“空间展宽”效应,证明了实际有效分辨率由平均分辨率(Navg)决定,而非理论最细分辨率(Nmax)。
- 主要实验结果:
- 理论推导与实验高度吻合:在2D验证中,理论预测的PSF轮廓与实验测量的PSF曲线几乎重合(如图2所示)。总展宽因子βemp ≈ 3.0(对于Adam优化器)。
- 两相互作用分析:实证表明,可分辨两点的临界距离dcrit与经验FWHM(即与1/Navg成正比)线性相关,而非Nmax(如图3)。
- 哈希碰撞影响:有限容量的哈希表碰撞会引入类似散斑的噪声并降低信噪比(SNR)(如图4)。
- 旋转MHE (R-MHE) 性能:在2D图像回归任务中,R-MHE(M=8)相比标准MHE实现了平均+0.94 dB的PSNR提升(从23.88 dB到24.82 dB)(表1,图5)。在3D NeRF任务中,R-MHE(Icosa)仅带来约+0.13 dB的边际提升(35.346 vs 35.479 dB),在误差范围内(表2,图8)。在3D SDF任务中,所有方法均达到近乎完美的重建(IoU > 0.996),收益饱和(表3,图9)。
- 实际意义:建立了一套基于物理原则的MHE分析框架,能指导超参数(如增长因子b)的选择;提出的R-MHE是一种即插即用的、零参数增加的改进,能提升各向同性。
- 主要局限性:R-MHE在标准3D重建基准测试(NeRF, SDF)上的性能提升统计上不显著,可能在内存受限或视角稀疏的场景下优势更明显;该框架主要针对稀疏约束下的MHE行为,未完全解决MHE在实际训练中的所有复杂性。
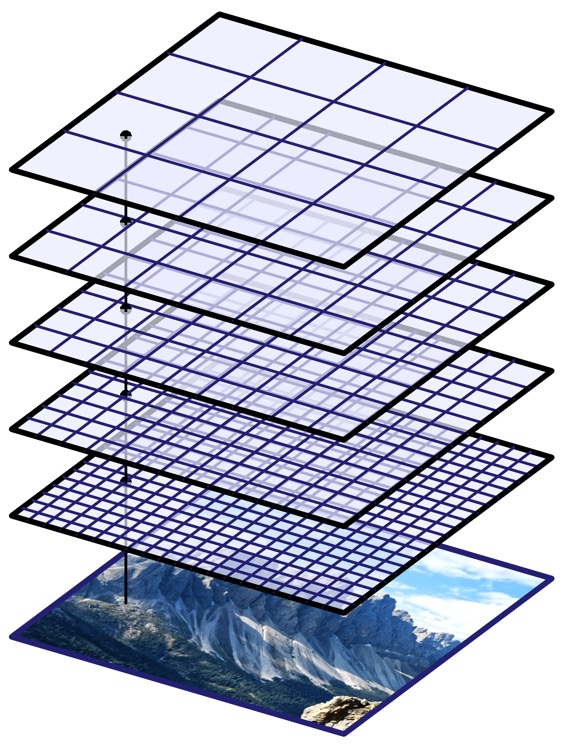
🏗️ 模型架构
本文分析的核心架构是多分辨率哈希编码(MHE),并提出了其改进版本旋转MHE(R-MHE)。
整体输入输出流程(以MHE为例):
- 输入:空间坐标
x(如3D点(x, y, z))。 - 多分辨率网格处理:
有
L个分辨率级别,每个级别l的网格分辨率为N_l = N_min b^l。- 对每个级别,输入坐标
x被缩放至对应分辨率N_l,然后通过空间哈希函数H映射到一个容量为T的特征表F_l中的一个或多个条目。 - 使用多线性插值(基于1D的帐篷函数核
K(u) = max(0, 1-|u|))获取该坐标处的特征向量e_l。
- 对每个级别,输入坐标
- 特征拼接:所有
L个级别的特征e_l被拼接成最终编码e(x) = [e_0; e_1; ...; e_{L-1}]。 - 输出:编码
e(x)通常输入到一个轻量级MLP解码器g_θ,输出目标值(如辐射度、SDF值)。在本文的PSF分析中,解码器被线性化近似为f(x) ≈ W e(x)以隔离编码器的性质。
主要组件及内部结构:
- 多分辨率网格:核心结构,利用从粗到细的网格捕获从低频到高频的信息。
- 哈希函数
H:将高维网格顶点索引映射到一维特征表索引,允许多个顶点共享同一特征向量(碰撞),以实现参数效率。 - 插值核
K:基于帐篷函数的多线性插值,负责从离散网格特征生成连续空间的响应。其自相关函数(B样条)决定了诱导核的形状。 - 特征表
F_l:存储每个网格顶点处的可学习特征向量。
R-MHE的关键设计:
- 修改点:在每一层
l,对输入坐标x先应用一个层特定的旋转矩阵R_l,然后再进行哈希和插值。即e_l(x) = Interpolate(F_l, H(⌊N_l R_l x⌉))。 - 动机与交互:通过为不同分辨率的网格赋予不同的方向,可以平均化各单个网格固有的轴对齐各向异性,从而获得更各向同性的整体PSF。
- 旋转策略:
2D:采用渐进旋转策略,第
l层旋转角度为l θ,通过参数M(θ = 90°/M)控制旋转多样性。- 3D:采用均匀采样SO(3)空间的策略,利用正多面体(四面体、立方体、八面体、二十面体)的顶点方向作为旋转矩阵,循环分配给各层。
💡 核心创新点
- 基于PSF的MHE分析框架:创新性地将MHE类比为物理成像系统,用点扩散函数(PSF)表征其空间响应。此前,MHE的空间行为主要依赖经验和启发式理解。该框架提供了量化空间分辨率、各向异性和噪声(碰撞导致)的严格工具。
- 发现“优化展宽”效应并揭示有效分辨率决定因素:理论推导与实验共同发现,尽管理论最细分辨率
N_max很高,但优化动态(频谱偏差)会使实际响应的PSF显著变宽,其半高宽(FWHM)由平均分辨率N_avg决定。这颠覆了“更细网格必然带来更高分辨率”的直觉。 - 旋转MHE(R-MHE)架构:基于对PSF各向异性的分析,提出了一种简单有效的改进架构。在不增加任何参数和计算开销的前提下,仅通过对每层输入坐标施加不同旋转,就显著改善了PSF的各向同性。
- 验证了基于PSF的超参数选择原则:利用
β_emp ≈ 3.0的经验展宽因子,可以理论计算最优增长因子b,并在2D图像回归和3D NeRF实验中证明该预测与经验最优值高度一致(如图8)。
🔬 细节详述
- 训练数据:
- PSF验证实验:2D/3D中的单点或双点目标。
- 2D图像回归:三张高分辨率图像(Mountain, City, Forest),中心裁剪为正方形(如2473x2473)。
- 3D NeRF:Synthetic NeRF数据集(8个场景)。
- 3D SDF:三个标准网格(Armadillo, Bunny, Spot)。
- 损失函数:
- PSF分析:单点目标
L = (f(x_0) - A)^2。 - 2D图像回归:MSE损失。
- 3D NeRF/SDF:遵循Instant-NGP的默认损失设置(NeRF中为渲染像素颜色与真实像素的MSE损失)。
- PSF分析:单点目标
- 训练策略:
- 优化器:Adam优化器(研究中也测试了其他优化器,但主要结果基于Adam)。
- 训练步数:2D图像回归为5000步;3D任务为20,000步。
- 学习率:2D实验为0.001。
- Batch Size:2D实验为131,072个像素/迭代。
- 关键超参数:
- MHE/R-MHE:层数
L=16, 每层特征数F=2, 哈希表容量T=2^{18}或2^{19}。 - 展宽因子:经验总展宽因子
β_emp ≈ 3.0(对于Adam优化器)。 - R-MHE (2D):旋转多样性参数
M ∈ {2, 4, 8}。 - R-MHE (3D):旋转策略类型(Tetra, Cube, Octa, Icosa)。
- MHE/R-MHE:层数
- 训练硬件:论文中未明确说明训练所使用的GPU型号、数量或训练时长。
- 推理细节:对于NeRF,采用标准的分层采样和体积渲染。对于SDF,采用标准的网格提取和评估。
- 正则化或稳定训练技巧:论文中未提及除标准Instant-NGP设置外的特殊技巧。其核心贡献在于对编码本身的分析和改进,而非训练技巧。
📊 实验结果
主要对比表格:
表1:2D图像回归性能(平均PSNR ± 标准差,单位:dB)
| 方法(有效旋转数M) | 平均PSNR (dB) ↑ |
|---|---|
| Standard MHE (M=1) | 23.88 ± 0.02 |
| R-MHE (M=2) | 24.62 ± 0.01 |
| R-MHE (M=4) | 24.69 ± 0.01 |
| R-MHE (M=8) | 24.82 ± 0.01 |
- 结论:R-MHE在2D图像回归任务上带来了显著且一致的PSNR提升(最高+0.94 dB),验证了其改善各向同性带来的实际效益。
表2:3D NeRF重建性能(平均PSNR ± 标准差,单位:dB)- Synthetic NeRF数据集
| 配置 | 方法 | 平均PSNR (dB) ↑ |
|---|---|---|
| 基准启发式(经验最优b) | Standard MHE | 35.346 ± 0.105 |
| R-MHE (Tetra) | 35.472 ± 0.114 | |
| R-MHE (Icosa) | 35.479 ± 0.134 | |
| PSF引导(理论b) | Standard MHE | 35.329 ± 0.100 |
| R-MHE (Icosa) | 35.440 ± 0.119 |
- 结论:在3D NeRF任务中,R-MHE的提升非常微小(约0.1 dB),且标准差重叠,统计显著性不足。同时验证了PSF引导的超参数选择策略(理论b)与经验最优值性能匹配。
表3:3D SDF重建性能(IoU ↑)
| 方法 | Armadillo | Bunny | Spot | 平均IoU |
|---|---|---|---|---|
| Standard MHE | 0.9994 ± 0.0002 | 0.9966 ± 0.0001 | 0.9998 ± 0.0001 | 0.9986 |
| R-MHE (Icosa) | 0.9994 ± 0.0002 | 0.9966 ± 0.0001 | 0.9998 ± 0.0001 | 0.9986 |
- 结论:所有方法在SDF任务上都达到了近乎完美的重建(IoU > 0.996),性能饱和,R-MHE无额外增益。
关键图表分析:
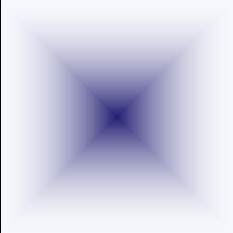
- 图a,b:展示了PSF剖面。实线(实验)与虚线(含展宽因子的理论)完美贴合。清晰可见沿轴向(较窄)与对角线方向(较宽)的各向异性。
- 图c,d:量化了各向异性比率和FWHM随参数变化的趋势,与理论预测一致。
- 图b:展示了临界分辨距离
d_crit与经验FWHM(与1/Navg成正比)呈线性关系,而非N_max。
- 图b:展示了临界分辨距离
- 图a:展示了各向异性比率随旋转多样性M先降后升的趋势,证明适度旋转(如M=8)能最大化各向同性。
- 图b:PSF形状从菱形(M=1)变为更圆的形状(M=4, 8),直观展示各向同性改善。
- 图c-e:定性对比了重建图像的局部放大图,R-MHE在细节处伪影更少。
- 展示了8个场景中PSNR随增长因子
b的变化曲线。关键点在于,所有场景的性能峰值区域都包含了理论预测值b_theory ≈ 1.38,有力验证了PSF分析指导超参数选择的有效性。
- 展示了8个场景中PSNR随增长因子
⚖️ 评分理由
- 学术质量:6.0/7。创新性(引入PSF分析框架,发现展宽效应)和技术正确性(数学推导严谨)突出。实验充分,覆盖了从理论验证到2D应用再到主流3D基准的完整链条。证据可信度高,理论预测与实验数据吻合良好。主要扣分点在于R-MHE在3D NeRF等标准任务上的提升幅度有限,且论文自身也承认其收益可能更体现在非典型场景,削弱了该改进的普适冲击力。
- 选题价值:1.0/2。选题聚焦于核心编码技���MHE的优化,属于计算机图形学与神经表示学习的交叉前沿。其提出的分析框架具有方法论上的潜在影响力。然而,该工作与音频/语音处理领域没有直接关联,对后者读者的相关性很低。
- 开源与复现加成:0/1。论文未提供代码、模型或数据集的开源链接或计划。尽管论文提供了详细的实验配置(如学习率、batch size、MHE参数)和关键的经验常数(β_emp ≈ 3.0),为复现提供了良好基础,但核心的PSF测量代码和R-MHE实现仍需读者自行开发,因此无法给予加成。