📄 Microphone-Less Measurement of Three-Dimensional Radiating Impulse Response of Sound Source using Spherical Harmonic-Domain Acousto-Optic Tomography
#声源定位 #信号处理 #3D音频 #麦克风阵列
✅ 7.0/10 | 前25% | #声源定位 | #信号处理 | #3D音频 #麦克风阵列
学术质量 6.0/7 | 选题价值 2.0/2 | 复现加成 -1.0 | 置信度 高
👥 作者与机构
- 第一作者:Yuzuki Saito(早稻田大学)
- 通讯作者:未说明
- 作者列表:Yuzuki Saito(早稻田大学)、Kenji Ishikawa(NTT, Inc.)、Risako Tanigawa(早稻田大学 & NTT, Inc.)、Yasuhiro Oikawa(早稻田大学)
💡 毒舌点评
这篇论文巧妙地利用高速光学成像“绕过”了麦克风阵列的物理限制,首次实现了声源三维脉冲响应的无接触全空间测量,概念上堪称“声学CT”。其主要短板在于,这种基于物理模型的重建方法计算复杂度高,且受限于球谐展开的阶数,在高频和低频两端的重建精度明显下降,表明该方法目前更像一个精确但笨重的“原型”,距离便捷实用的工程工具还有距离。
🔗 开源详情
- 代码:论文中未提及代码链接。
- 模型权重:不适用。未提及公开任何模型权重。
- 数据集:未提及。
- Demo:未提及。
- 复现材料:论文提供了详细的实验条件参数表(表1、表2)和方法描述,但缺乏算法实现的关键细节(如tsVD的具体截断策略、矩阵构建的优化代码),复现难度极高。
- 论文中引用的开源项目:论文引用了多篇光学和声学测量的参考文献,但未明确指出依赖于特定的开源软件库或工具。
📌 核心摘要
本文旨在解决传统麦克风阵列测量声源三维脉冲响应(IR)时存在的空间分辨率受限和干扰声场等问题。论文提出了一种基于球谐域声光层析成像(SH-AOT)的新方法。其核心是利用并行相移干涉术(PPSI)从多个方向测量声源辐射的延时脉冲(TSP)信号,获得多个二维线积分IR(LIR),然后利用基于亥姆霍兹方程的物理模型,通过求解球谐系数,从这些线积分数据中重建出三维的点状IR。与已有的仅能获取二维LIR的PPSI方法相比,本工作的创新点在于实现了三维重建;与麦克风阵列相比,其优势是非接触、高空间分辨率且不干扰声场。实验使用扬声器作为声源,将PPSI测量结果与16通道线性麦克风阵列的扫描测量结果进行对比。结果显示,两种方法得到的声辐射模式一致(见图2),单点波形和频谱在主要频段吻合较好(见图3),并成功可视化了三维IR的辐射球面波(见图4)。该工作的实际意义是为声源三维特性分析提供了一种全新的高分辨率测量手段。其主要局限性是高频重建不完美(受球谐阶数M=5限制)和低频测量困难(受光学方法原理限制),且计算复杂度高。
🏗️ 模型架构
本文的核心不是传统的数据驱动神经网络,而是一个基于物理模型的信号处理与重建框架。其流程可以视为一个多阶段的“计算成像”流水线。
整体流程与主要组件:
多方向光学测量(数据获取阶段):
- 输入:由高速偏振相机(PPSI系统)采集的、来自扬声器的TSP信号声场图像序列。
- 过程:将扬声器固定于旋转台,从18个不同角度(间隔10度)进行测量。每次测量获得一个二维平面上(320×512像素)的声压线积分值随时间变化的数据(即二维LIR
d_{ij}(t))。 - 输出:一组多方向、二维的LIR数据集。
二维LIR预处理(计算优化阶段):
- 组件:反卷积与加窗。
- 过程:将测量得到的LIR数据与已知的TSP信号的逆进行卷积(反卷积),得到标准脉冲响应形式的LIR。然后对其进行加窗处理,截取出感兴趣的IR部分,形成“窗口化LIR”(
LG_{ij})。这一步是为了降低后续三维重建的计算量。 - 输出:一组加窗后的二维LIR频域数据(
LG_{ij}(ω_s))。
球谐域三维重建(核心计算阶段):
- 组件:基于Helmholtz方程的球谐展开与系数估计。
- 过程:
- 假设三维空间中任意点(r, θ, φ)的IR频域表示
G(r, ω_s)可以用有限阶(M=5)球谐函数与球汉克尔函数的乘积展开(公式4)。 - 将展开式代入LIR的线积分表达式(公式3),得到LIR与球谐系数
a_{lm}之间的线性关系(公式5)。 - 将所有像素点(i,j)和所有频率点的关系整合成一个大型矩阵方程
D = Υa(公式7)。其中D是观测到的LIR数据向量,Υ是根据测量几何(像素位置)和球谐函数预先计算的已知矩阵,a是待求解的球谐系数向量。 - 使用截断奇异值分解(tsVD)求解该方程,得到系数
a。这是典型的逆问题求解。
- 假设三维空间中任意点(r, θ, φ)的IR频域表示
- 输出:描述三维IR场的球谐系数集
a_{lm}(ω_s)。
三维IR重构与可视化(输出阶段):
- 过程:将解得的系数
a代回球谐展开式(公式4),计算出三维空间中每个网格点上的IR频域值G(r, ω_s)。然后进行逆傅里叶变换,得到时域三维IR场。 - 输出:三维空间中每个点的IR时域波形,可用于任意切片(如图2a)或三维可视化(如图4)。
- 过程:将解得的系数
关键设计选择与动机:
- 两阶段处理(先算LIR再重建3D):动机是避免对超长TSP时域信号直接进行三维重建,因计算量过大。预先计算LIR将问题转化为对频域数据的处理,大大减少了需要重建的数据维度。
- 球谐域重建:选择SH-AOT而非直接的层析反投影,是因为球谐函数是描述球面波传播的自然基函数,能更好地结合声场的物理模型(Helmholtz方程),理论上重建更准确、稳定。
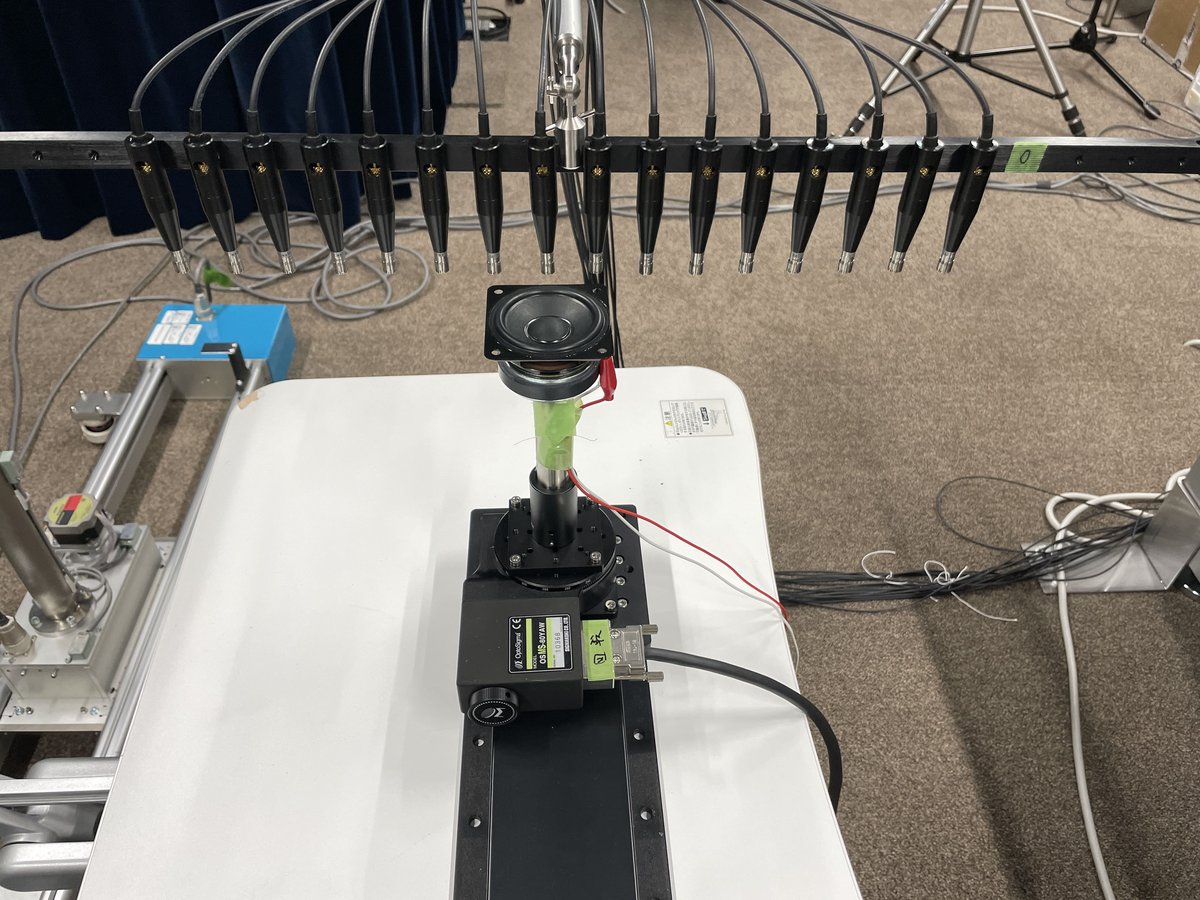
 (图1展示了PPSI测量(a)和麦克风阵列测量(b)的实验装置。PPSI通过旋转声源实现多方向测量,麦克风阵列则进行扫描式测量,两者最终都用于获取声场信息。)
(图1展示了PPSI测量(a)和麦克风阵列测量(b)的实验装置。PPSI通过旋转声源实现多方向测量,麦克风阵列则进行扫描式测量,两者最终都用于获取声场信息。)
💡 核心创新点
- 首次实现无麦克风的三维脉冲响应测量:突破了传统光学声学成像仅能获取二维线积分信息的限制,通过结合多方向测量与基于物理模型的三维重建算法,首次获得了声源完整的三维IR辐射特性。这是方法论上的根本创新。
- 将SH-AOT方法应用于IR可视化:虽然SH-AOT方法本身已存在(参考文献[18]),但本文将其具体应用于测量和可视化瞬态的脉冲响应(IR)信号,而非稳态声场,拓展了该方法的应用范畴。
- 提出针对IR测量的计算优化流程:针对TSP信号长、重建计算量大的矛盾,提出了“先计算窗口化LIR,再进行三维重建”的分步策略,在保证精度的前提下提升了方法的实用性。
🔬 细节详述
- 训练数据:本研究无“训练数据”概念。实验数据是使用PPSI和麦克风阵列实际测量获得的。
- 损失函数:本研究无神经网络,因此无损失函数。其核心是最小化线性方程组
D = Υa的残差,采用tsVD求解。 - 训练策略:不适用。
- 关键超参数:
- 球谐展开最大阶数 M = 5。这是控制重建精度与计算复杂度平衡的关键参数,引自参考文献[21]。
- TSP信号参数:源长度 T=1秒,采样频率 fs=42,000 Hz。
- PPSI测量参数:帧率42,000 fps,像素320×512,像素间距1.08e-3 m,方向间隔10度(共18个方向)。
- 三维重建参数:频率间隔5 Hz,可视化像素网格158×180×180,像素间距1.08e-3 m。
- 训练硬件:未说明。
- 推理细节:tsVD用于求解伪逆。具体截断阈值未说明。
- 正则化或稳定训练技巧:tsVD本身是一种正则化方法,通过截断小的奇异值来稳定逆问题的解。
📊 实验结果
论文的主要实验目的是验证所提方法的有效性。
主要验证结果:
二维切片对比(定性验证):图2展示了在x=0平面上,由PPSI重建的IR(a)与麦克风阵列测量的IR(b)对比。结论是两者显示出相似的声辐射模式,且PPSI由于像素间距更小(1.08 mm),波前表示更平滑。
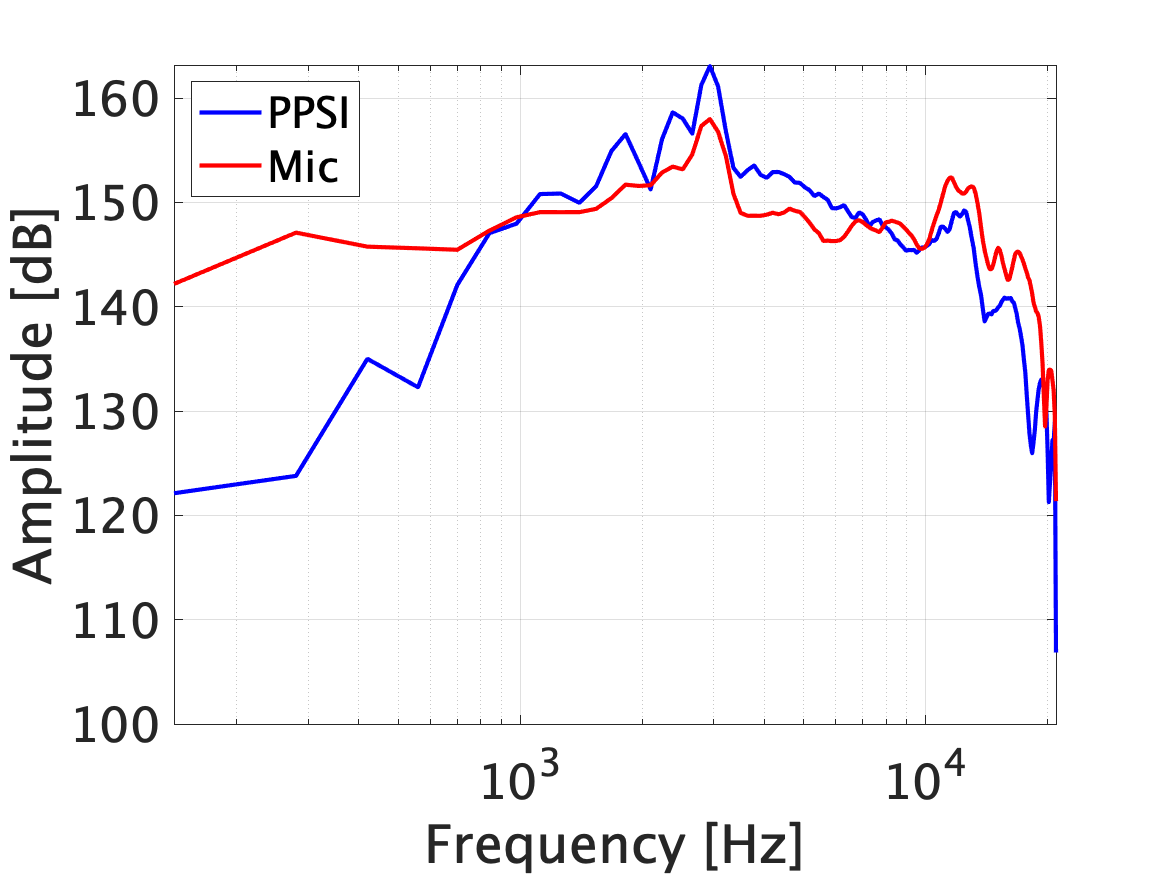
单点定量对比:图3展示了坐标为(0, 0, 0.025)处的IR波形(a)和振幅谱(b)。
- 波形:PPSI与麦克风测量的幅度接近,但PPSI波形在高频段更圆滑,缺少细节。
- 频谱:PPSI在高频段(>~10kHz)幅度略有下降,在低频段(<~500Hz)幅度下降明显。
- 结论:重建在主要频段成功,但高频受限于M阶截断,低频受限于PPSI光学测量原理。
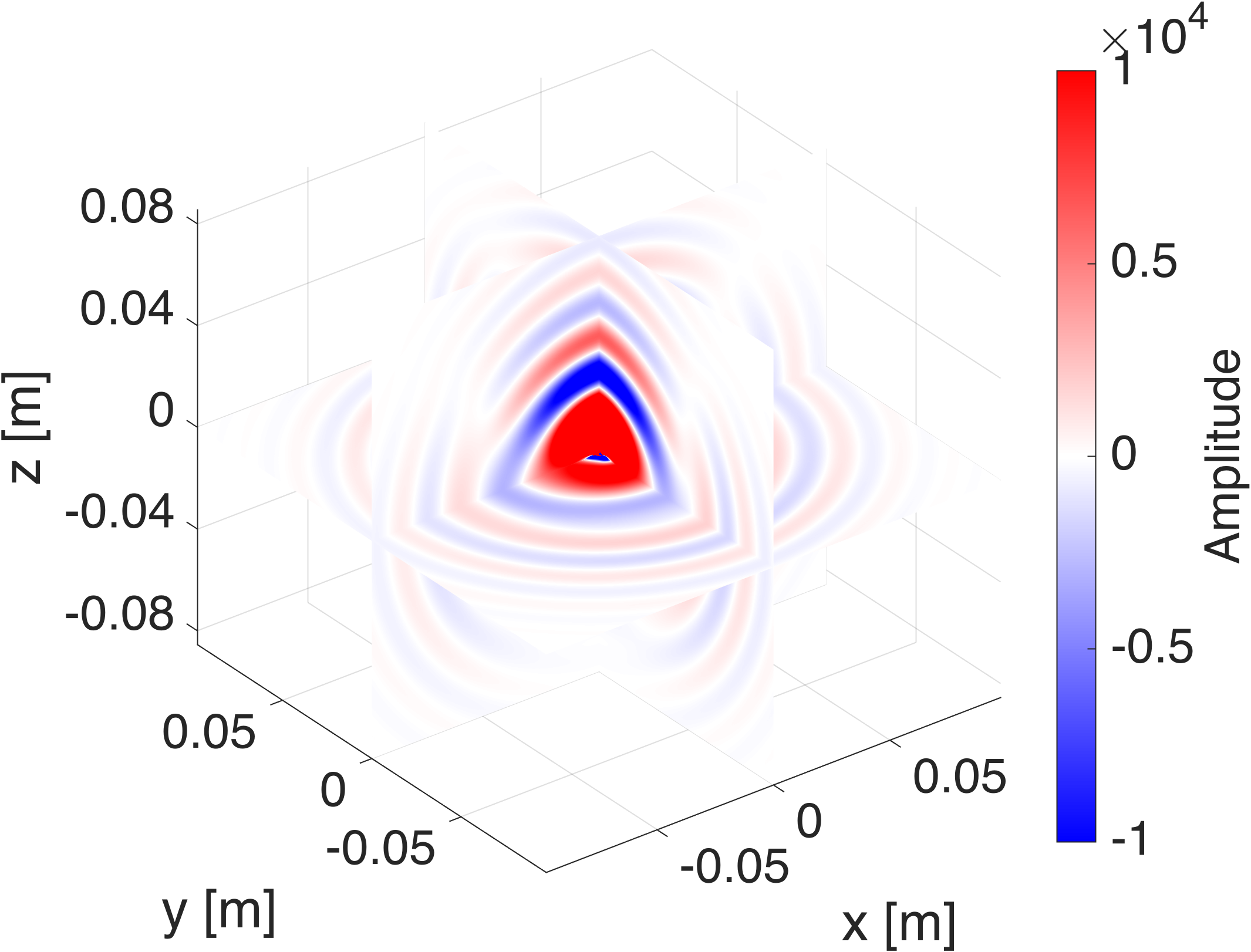
三维可视化展示:图4展示了在t=3.45 ms时刻的三维IR重建结果(切片图a和点云图b)。清晰地显示了声波以平滑球壳状向外辐射。
主要定量结果:论文未提供如均方误差、相关系数等定量评价指标的具体数值。验证主要基于视觉对比和波形/频谱的定性比较。
关键消融实验:论文未进行。最大展开阶数M的选择被固定为5,并指出增大M可改善高频但增加计算量,这构成了一个未深入探索的权衡。
与最强基线对比:基线为16通道线性麦克风阵列。对比结论是两者在主要特性上一致,验证了所提方法的有效性。
⚖️ 评分理由
- 学术质量:6.0/7。论文提出了一个完整、有物理依据的新方法,并设计了严谨的对比实验进行验证,结论可信。主要扣分点在于缺乏更深入的定量评估(如误差分析)、未探索M阶数等关键超参数的影响,以及实验仅限于单一简单声源,普适性有待检验。
- 选题价值:2.0/2。选题位于声学测量前沿,解决了实际工程中的痛点(非接触、三维、高分辨率),具有明确的应用价值和创新性。
- 开源与复现加成:-1.0/1。论文未提供任何开源代码、数据或详细的实现指南,极大地阻碍了其他研究者复现和验证其工作,也限制了该方法的推广和应用。这是明显的短板。