📄 Joint Deep Secondary Path Estimation and Adaptive Control for Active Noise Cancellation
#语音增强 #端到端 #实时处理 #深度学习 #信号处理
✅ 7.5/10 | 前25% | #语音增强 | #端到端 | #实时处理 #深度学习
学术质量 6.0/7 | 选题价值 1.5/2 | 复现加成 0 | 置信度 高
👥 作者与机构
- 第一作者:Fareedha (National Institute of Technology, Warangal, Telangana, India)
- 通讯作者:未说明
- 作者列表:Fareedha (National Institute of Technology, Warangal, Telangana, India)、Vasundhara (National Institute of Technology, Warangal, Telangana, India)、Asutosh Kar (Birmingham City University, Birmingham, UK)、Mads Græsbøll Christensen (Aalborg University, Denmark)
💡 毒舌点评
论文将深度学习中的估计与控制模块“缝合”得相当流畅,消融实验做得很扎实,有力地证明了注意力机制和双向LSTM在其中的价值。然而,核心创新更多是工程层面的集成优化,而非方法论的革新;且实验场景(主要是飞机噪声)稍显单一,要宣称在“动态环境”下鲁棒,或许还应挑战更多极端的非平稳声学条件。
🔗 开源详情
- 代码:论文中未提及代码链接或开源计划。
- 模型权重:论文中未提及公开模型权重。
- 数据集:论文中使用的数据集为公开数据库AIR和RWCP(参考文献[20]),但论文本身未提供其处理后的版本或下载链接。训练数据的具体生成脚本未公开。
- Demo:论文中未提及在线演示。
- 复现材料:论文给出了部分训练细节(如优化器、学习率、帧长)和模型架构参数(如表1),但未提供完整的配置文件、训练脚本或检查点。
- 论文中引用的开源项目:论文引用了PyTorch作为实现框架,并引用了多个基线方法的论文(如SFANC, GFANC),但未明确列出依赖的具体开源代码库。
📌 核心摘要
- 要解决什么问题:传统主动噪声控制(ANC)系统依赖自适应滤波器,其二次路径估计(SPE)收敛慢且难以适应快速变化的声学环境;而现有基于深度学习的ANC方法通常假设二次路径固定,限制了其实际应用。
- 方法核心是什么:提出一个端到端的双流深度学习框架。其一为DeepSPE模块,利用1D卷积、双向LSTM和注意力机制,从参考信号和控制器输出中实时预测二次路径。其二为ANC-Net控制器,它将参考信号与预测的二次路径作为输入,通过卷积、挤压激励(SE)块和注意力机制生成二进制权重,动态选择一组预训练的子控制滤波器以合成控制信号。
- 与已有方法相比新在哪里:首次将二次路径估计和抗噪声信号生成统一在一个数据驱动的端到端框架内,无需迭代适应。与传统自适应方法(如FxLMS)相比,它消除了收敛过程;与现有固定路径的深度ANC方法(如SFANC, GFANC)相比,它能实时适应变化的二次路径。
- 主要实验结果如何:
- SPE性能:DeepSPE的NMSE为-16.27 dB,相关系数为0.9887,显著优于Eriksson、Kuo和Akhtar等经典方法(表2)。
- ANC-Net性能:ANC-Net的NMSE为-12.38 dB,参数量仅1.05M,推理延迟0.43ms,在精度、复杂度和延迟上优于ResNet18/50、DenseNet121等基线(表3)。
- 端到端系统:在飞机噪声测试中,所提系统实现了最低的残余噪声水平和快速的收敛速度,优于所有对比的传统和深度学习方法(图5)。
- 实际意义是什么:为设计鲁棒、低延迟、能适应复杂多变环境(如汽车座舱、耳机、室内)的下一代ANC系统提供了可行的技术方案,具有明确的工业应用前景。
- 主要局限性是什么:论文的评估主要集中在飞机噪声场景和合成/模拟的脉冲响应上;缺乏在更复杂、非平稳的真实世界噪声环境(如办公室突变噪声、街道交通噪声)中的广泛验证。此外,模型完全依赖合成数据训练和评估,与真实部署可能存在的差距尚未充分探讨。
🏗️ 模型架构
本文提出的系统由两个核心深度学习模块(DeepSPE 和 ANC-Net)以及一个传统的子带滤波器选择机制构成,整体架构如图3所示。
DeepSPE模块(二次路径估计器):
- 输入:参考信号
x(n)和控制器输出y(n)在时域上拼接成[2 x T]的张量,其中T为帧长(论文中为512采样点)。 - 架构(见表1):
- 特征提取:首先通过两个1D卷积层(64和128个卷积核)提取局部时序特征。
- 时序建模:接着通过一个双向LSTM层(128个单元)捕捉长程依赖关系。
- 注意力聚焦:一个点积注意力层对LSTM的输出进行加权,聚焦于对路径估计最关键的时间步。
- 输出映射:一个全连接层将注意力加权后的特征向量映射为长度为
L(脉冲响应长度)的向量,即为预测的二次路径Ŝ(z)。
- 训练:使用预测路径
Ŝ(z)与真实路径S(z)之间的均方误差(MSE)作为损失函数进行监督学习。
- 输入:参考信号
ANC-Net控制器:
- 输入:参考信号
x(n)和来自DeepSPE的预测路径Ŝ(z)拼接成[2 x T]的张量。 - 架构(见图2):
- 特征提取与增强:使用堆叠的2D卷积层处理输入,随后应用通道级的挤压激励(SE)块。SE块通过全局平均池化、全连接和Sigmoid激活来重新校准通道特征,强调重要的噪声成分。
- 时序与注意力建模:特征图通过双向LSTM捕捉长期依赖,然后通过多头注意力模块聚合上下文信息。
- 决策输出:全连接层后接一个阈值化的Sigmoid函数,输出一个K维的二进制权重向量
w(n) ∈ {0, 1}^K。每个权重w_k控制对应的预训练子控制滤波器f_k是否被激活。
- 输入:参考信号
系统集成与信号流(见图3):
- DeepSPE实时估计当前的二次路径
Ŝ(z)。 ANC-Net根据x(n)和Ŝ(z)生成二进制权重,选择子滤波器并合成复合控制滤波器F(z) = Σ w_k f_k。 - 控制信号
y(n)由x(n)与F(z)卷积得到。 - 抗噪声信号
ŷ(n)由y(n)与 预测的 二次路径Ŝ(z)卷积生成。 - 残余误差
e(n)为原始噪声d(n)与ŷ(n)之差,该误差被反馈用于在线更新ANC-Net(如算法1所示)。
- DeepSPE实时估计当前的二次路径
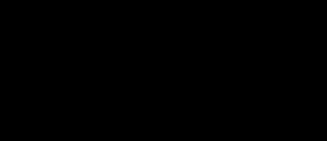 图2详细展示了ANC-Net的内部结构,包括卷积层、SE模块、BiLSTM、多头注意力以及最终生成二进制权重向量的过程。
图2详细展示了ANC-Net的内部结构,包括卷积层、SE模块、BiLSTM、多头注意力以及最终生成二进制权重向量的过程。
 图3展示了整个系统的信号流和模块集成方式,清晰地标明了DeepSPE和ANC-Net如何协同工作,并与传统的参考麦克风、误差麦克风、主路径、次路径等声学组件交互。
图3展示了整个系统的信号流和模块集成方式,清晰地标明了DeepSPE和ANC-Net如何协同工作,并与传统的参考麦克风、误差麦克风、主路径、次路径等声学组件交互。
💡 核心创新点
- 联合估计与控制的端到端框架:是什么:将二次路径估计(SPE)和抗噪声控制信号生成两个通常分离的任务,整合到一个统一的、由数据驱动的端到端系统中。之前局限:传统方法将SPE和控制滤波器更新解耦,需要迭代适应;现有深度学习ANC方法假设SPE固定。如何起作用:DeepSPE的输出直接作为ANC-Net的输入之一,引导控制器根据当前估计的声学路径动态调整策略。收益:消除了迭代适应的收敛时间,提高了对动态环境的响应速度。
- 基于动态滤波器选择的轻量级控制:是什么:ANC-Net不直接生成控制滤波器系数,而是生成二进制权重,从一个预训练的、覆盖不同噪声特征的子滤波器库中动态选择组合。之前局限:端到端生成FIR/IIR系数或直接输出波形的方法计算复杂度高,延迟大,且训练困难。如何起作用:将复杂的滤波器设计问题转化为一个更简单的分类(选择)问题。收益:显著降低了在线推理的计算量和延迟(论文中仅0.43ms),同时保持了高性能。
- 融合多种机制的深度学习组件设计:是什么:在DeepSPE和ANC-Net中,有针对性地融合了CNN(捕获局部模式)、RNN/BiLSTM(建模长期依赖)和注意力机制(聚焦关键信息)。之前局限:单一结构(如纯CNN或纯RNN)可能无法全面建模复杂的声学信号和路径特征。如何起作用:例如,BiLSTM处理序列上下文,注意力机制帮助网络忽略不相关的时间段。收益:消融实验(表2, 表3)定量证明了每个组件对最终性能的贡献,增强了模型的可解释性和有效性。
🔬 细节详述
- 训练数据:
- DeepSPE训练集:使用了来自AIR和RWCP数据库(参考文献[20])的9000个真实和模拟的房间脉冲响应(RIR)作为二次路径的ground truth。每条RIR对应一个独立的二次路径。
- 数据生成流程(见图1):对于每个RIR
S(z),使用合成噪声x(n)通过一个经典的FxLMS控制器(模拟真实ANC行为)生成y(n)。将{x(n), y(n), S(z)}三元组作为训练样本,标签是S(z)。测试集使用了另外500个未见过的RIR。 - ANC-Net训练集:使用了80,000个合成样本(参考文献[21]),验证集和测试集各2000个。具体生成方式论文中未详细说明。
- 损失函数:DeepSPE使用均方误差(MSE),公式为
L = 1/L * Σ(S(z) - Ŝ(z))²。ANC-Net的损失函数未明确说明,但从算法1第10行推断,可能是基于残余误差e(n)的某种损失(如MSE),用于更新网络权重以最小化噪声。 - 训练策略:
- DeepSPE:优化器为Adam,学习率为
1e-4。输入帧长T=512采样点(32ms @ 16kHz),50%重叠。 - ANC-Net:论文中未提供具体的优化器、学习率、batch size等训练超参数。
- DeepSPE:优化器为Adam,学习率为
- 关键超参数:
- 系统采样率:16 kHz,带通滤波范围20-7980 Hz。
- DeepSPE输出脉冲响应长度
L:未说明具体数值。 - ANC-Net子滤波器库大小
K:15个预训练子控制滤波器。
- 训练硬件:NVIDIA RTX 3090 GPU。
- 推理细节:系统以帧为单位进行推理(DeepSPE, ANC-Net),以样本为单位进行噪声对消(卷积运算)。ANC-Net输出的二进制权重实现了低延迟的样本级控制。
- 正则化或稳定训练技巧:未明确说明。模型架构中使用了ReLU激活函数和Batch Normalization(如图2所示)。
📊 实验结果
论文在三个层面进行了评估:二次路径估计性能、控制器性能以及端到端系统性能。
- 二次路径估计(SPE)性能对比
方法 NMSE (dB) 相关系数 (R) Eriksson’s method -7.63 0.9297 Kuo’s method -10.17 0.9555 Akhtar’s method -12.35 0.9721 Proposed DeepSPE (Full) -16.27 0.9887 消融:w/o Attention -13.10 0.9420 消融:w/o BiLSTM -10.90 0.9330 消融:Conv1D Only -8.30 0.9060
表2总结:DeepSPE在精度上大幅领先传统自适应方法。消融研究证明,去除注意力机制和BiLSTM会导致性能显著下降,验证了多组件集成设计的有效性。
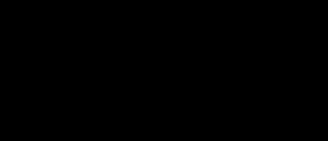 图4直观展示了DeepSPE估计的脉冲响应与真实脉冲响应几乎完全重合,而经典方法则存在明显的偏差和振荡,视觉上印证了表2的定量结果。
图4直观展示了DeepSPE估计的脉冲响应与真实脉冲响应几乎完全重合,而经典方法则存在明显的偏差和振荡,视觉上印证了表2的定量结果。
- ANC-Net控制器性能对比
方法 NMSE (dB) 参数量 (M) 延迟 (ms) FxLMS (fixed S(z)) -5.42 – 0.10 FxLMS (adaptive S(z)) -7.15 – 0.15 1D CNN -8.64 0.42 0.30 ResNet18 -10.82 11.20 1.85 ResNet50 -11.25 23.50 2.60 DenseNet121 -11.68 7.98 2.20 ANC-Net (full) -12.38 1.05 0.43 消融:w/o SE Block -10.92 0.94 0.49 消融:w/o BiLSTM -9.87 0.78 0.47 消融:w/o Attention -8.72 0.83 0.46 消融:Conv2D Only -8.15 0.63 0.44
表3总结:ANC-Net在NMSE上优于所有对比的深度模型(ResNet, DenseNet),同时参数量小一个数量级,延迟低4-6倍。消融研究再次证实了SE块、BiLSTM和注意力机制对精度的贡献。
- 端到端系统性能
 图5是系统性能的核心证据。在飞机噪声场景下,所提方法(Proposed)的残余噪声功率谱在整个频带内都是最低的,且收敛速度最快。相比之下,传统方法(Eriksson, Kuo, Akhtar)和早期的深度学习方法(SFANC, GFANC)在中高频段的噪声抑制效果明显较差,稳态误差更高。论文指出该结果在5次随机试验中方差小于0.3 dB。
图5是系统性能的核心证据。在飞机噪声场景下,所提方法(Proposed)的残余噪声功率谱在整个频带内都是最低的,且收敛速度最快。相比之下,传统方法(Eriksson, Kuo, Akhtar)和早期的深度学习方法(SFANC, GFANC)在中高频段的噪声抑制效果明显较差,稳态误差更高。论文指出该结果在5次随机试验中方差小于0.3 dB。
⚖️ 评分理由
- 学术质量:6.0/7:论文工��扎实,问题定义明确,提出的双流端到端框架具有新颖性,技术细节(模型架构、数据生成、训练设置)描述清晰。消融实验设计合理,有力地支持了各个模块的有效性。主要扣分点在于:1)核心创新点更偏向于现有技术的集成与优化,而非原理性突破;2)实验场景和噪声类型相对单一(主要是飞机噪声),缺乏对更广泛、更极端动态声学环境的验证,使得“鲁棒性”结论的普适性存疑。
- 选题价值:1.5/2:主动噪声控制是声学信号处理的核心应用之一,市场需求明确。本文提出的自适应、低延迟深度学习方案,直接针对现有技术的痛点,对降噪耳机、汽车座舱降噪、工业噪声控制等实际应用具有明确的推动价值和启发意义。
- 开源与复现加成:0/1:论文中未提及任何代码、预训练模型或数据集的开源计划。尽管论文描述了实验设置和超参数,但缺乏开源材料会极大阻碍研究社区的快速验证和后续研究,因此此项不给分。