📄 Distributed Multichannel Active Noise Control with Asynchronous Communication
#信号处理 #分布式算法 #多通道 #实时处理
🔥 8.0/10 | 前25% | #信号处理 | #分布式算法 | #多通道 #实时处理
学术质量 6.0/7 | 选题价值 1.5/2 | 复现加成 0.5 | 置信度 高
👥 作者与机构
- 第一作者:Junwei Ji(南洋理工大学电气与电子工程学院)
- 通讯作者:未说明(但根���邮箱和贡献,可能是Woon-Seng Gan)
- 作者列表:
- Junwei Ji(南洋理工大学电气与电子工程学院)
- Dongyuan Shi(西北工业大学海洋科学与技术学院)
- Boxiang Wang(南洋理工大学电气与电子工程学院)
- Ziyi Yang(南洋理工大学电气与电子工程学院)
- Haowen Li(南洋理工大学电气与电子工程学院)
- Woon-Seng Gan(南洋理工大学电气与电子工程学院)
💡 毒舌点评
论文巧妙地将权重约束与异步触发机制结合,为分布式降噪系统提供了一个通信友好的实用方案,仿真实验也扎实地证明了其在降低通信开销方面的显著效果。然而,其核心创新是工程组合而非理论突破,且实验仅限于仿真环境,未在真实异步、有延迟的网络条件下进行验证,说服力打了折扣。
🔗 开源详情
- 代码:论文中提供了代码仓库链接:
https://github.com/Ji-Junwei/ACDMCANC。代码将在该链接发布。 - 模型权重:未提及。
- 数据集:论文中使用的声学路径数据在真实噪声室中测量,未说明是否公开或如何获取。
- Demo:未提及。
- 复现材料:论文给出了关键仿真参数(节点数、滤波器长度、步长、惩罚因子、采样率)和系统设置,但未提供声学路径的具体数据、补偿滤波器的估计方法细节或代码配置文件。复现需要基于这些参数自行搭建仿真环境或获取原始声学测量数据。
- 论文中引用的开源项目:未明确引用其他依赖的开源工具或模型。
📌 核心摘要
- 问题:传统的分布式多通道主动噪声控制(DMCANC)方法通常假设节点间同步且频繁地通信,导致通信开销过高,难以适应异构或资源受限的网络环境。
- 方法核心:提出异步通信DMCANC系统。每个节点独立运行权重约束的FxLMS(WCFxLMS)算法,在通信间隔期间保持稳定。节点根据本地噪声抑制性能的下降情况自主决定是否发起通信请求。响应时,其他节点仅传输其控制滤波器与中心点的权重差(weight difference),并通过混合权重差(MWD)操作融合信息,更新本地控制滤波器和中心点。
- 新意:与现有同步、每采样点都通信的分布式方法不同,该方法实现了按需、异步通信,大幅减少了通信次数。WCFxLMS确保了非通信期间的稳定性,MWD规则实现了异步信息的有效融合。
- 实验结果:在6节点系统中进行仿真。图3(a)显示,在抑制100-1000Hz宽带噪声时,ACDMCANC的降噪性能(ANSE)略低于集中式MEFxLMS和同步MGDFxLMS,但显著优于无通信的基准。图3(b)表明节点通信时间点不同,验证了异步性。图4(a)(b)在真实压缩机噪声下,ACDMCANC同样表现出有效的降噪性能,但收敛稍慢。关键数据:在图3(a)中,15秒时ACDMCANC的ANSE约比MEFxLMS差5-8 dB,但实现了“通信实例”的大幅减少(图3(b)显示节点1和2在15秒内仅分别触发通信约4次和2次)。
- 实际意义:该方法降低了对网络通信带宽和实时性的要求,提升了分布式降噪系统在异构网络中的可部署性、扩展性和鲁棒性。
- 局限性:由于异步通信和权重约束,其收敛速度和最终降噪性能略逊于完全同步通信的方法。仿真实验未考虑实际网络中的传输延迟和丢包问题。
🏗️ 模型架构
论文提出的ACDMCANC系统是一个分布式自适应信号处理系统,其核心架构由多个功能相同的ANC节点组成。每个节点包含一个参考传感器(共享)、一个次级声源、一个误差传声器和一个负责通信与处理的ANC控制器。图2展示了第k个节点的详细框图。
完整输入输出流程:
- 输入:节点接收共享的参考信号
x(n)和其误差传声器测量到的残余误差信号e_k(n)。 - 本地处理:在非通信阶段,控制器执行 WCFxLMS算法(公式10),利用本地梯度(由
x(n)通过本地次级路径估计S_hat_kk(n)滤波得到)和来自中心点的惩罚项,更新其本地控制滤波器w_k(n),生成控制信号y_k(n)。 - 抗噪生成:控制信号
y_k(n)驱动次级声源,产生抗噪声以抵消来自初级路径P_k(z)的扰动噪声d_k(n)(其中混入了其他节点产生的串扰γ_k(n))。 - 通信阶段:当节点k的本地平均残余噪声水平(ARNL)变差时,它向网络中的其他节点发送通信请求。
- 信息融合:收到请求后,其他节点m计算并发送其权重差
ϕ_m(n) = w_m(n+1) - e_w_m。节点k通过 MWD操作(公式14)将这些权重差与自身的权重差结合,并利用预先离线估计的补偿滤波器c_mk(n)来近似交叉次级路径的影响,融合生成新的控制滤波器e_w_k^new。 - 更新与输出:
e_w_k^new被同时赋值给当前控制滤波器w_k(n)和中心点e_w_k,作为下一轮迭代的起点。
主要组件与设计选择:
- WCFxLMS(公式9-10):在标准FxLMS的代价函数中加入
α||e_wk - w_k(n)||^2惩罚项。这是关键设计选择,其动机是在节点间通信中断时,将滤波器权重约束在中心点e_wk附近,防止因严重的声学串扰而导致滤波器发散,确保了系统的稳定性。 - 异步通信触发机制(公式11-12):基于本地ARNL的历史比较来决定是否通信。这使得每个节点的决策完全自主,是实现“异步”的核心。
- 权重差传输与MWD融合(公式13-14):不传输原始滤波器或梯度,而是传输“历史更新累积量”(权重差)。MWD公式是扩散FxLMS组合规则的扩展,将补偿滤波器
c_mk作用于邻居节点的权重差,实现了异步环境下的信息融合。
💡 核心创新点
- 异步通信触发与决策机制:每个节点基于本地性能(ARNL)独立决定通信时机,无需全局同步。这打破了传统分布式算法每个采样周期都必须通信的假设,显著提高了系统对网络延迟、带宽限制和异构性的适应能力。
- 权重约束(WCFxLMS)保障非通信期稳定性:引入带惩罚项的代价函数,在缺乏全局信息更新的间隔期内,有效抑制了因声学串扰引起的滤波器发散风险,为异步操作提供了必要的稳定性基础。
- 混合权重差(MWD)融合规则:设计了一种适应异步通信的数据融合方式。节点间交换的是代表本地调整历史的“权重差”,并通过包含补偿滤波器的MWD规则进行融合。这既减少了每次通信的数据量(固定长度向量),又能在不同时刻整合来自不同邻居的历史信息。
🔬 细节详述
- 训练数据/仿真设置:论文未提及使用公开数据集。声学路径(初级、次级)在配备ANC窗户的真实噪声室中测量。系统配置包含6个ANC节点,次级路径长度256,补偿滤波器长度33,控制滤波器长度512。采样频率16,000 Hz。
- 损失函数:核心是WCFxLMS的代价函数(公式9),包含两个部分:期望的残余误差平方项
E[e_k^2(n)]和权重约束项α||e_wk - w_k(n)||^2。惩罚因子α控制约束强度。 - 训练/更新策略:采用在线自适应滤波,而非离线训练。步长μ和惩罚因子α是关键超参数。仿真1(宽带噪声):μ=1×10⁻⁶, α=800, T=0.3s。仿真2(真实噪声):μ=5×10⁻⁶, α=400。未提及warmup、优化器等。
- 关键超参数:K=6(节点数),Lw=512,Ls=256,Lc=33。
- 训练硬件:未说明。
- 推理细节:系统以16kHz采样率实时运行,无解码等概念。
- 正则化/稳定技巧:WCFxLMS本身即是防止发散的正则化技巧。补偿滤波器
c_mk通过离线训练获得,用于在MWD中补偿串扰。
📊 实验结果
论文通过两个仿真实验验证了方法的有效性。主要指标为平均归一化平方误差(ANSE)。
主要Benchmark与结果:
对比方法:(i) 集中式MEFxLMS (基准上限),(ii) MGDFxLMS (每采样点同步通信),(iii) SCDMCANC (同步但采用WCFxLMS和MWD)。
实验1:宽带噪声抑制 (100-1000Hz)
- ANSE对比(图3(a)):集中式MEFxLMS和MGDFxLMS性能几乎重合,收敛快,稳态ANSE约-25dB。SCDMCANC收敛稍慢,稳态ANSE约-23dB。本文提出的ACDMCANC收敛最慢,稳态ANSE约-18dB,但远优于无通信情况(图中未显示)。
- 通信实例(图3(b)):Node 1在15秒内触发通信约4次,Node 2触发约2次,时间点不同,证实了异步性。
- 表格:实验1关键性能对比(从图3(a)估计)
方法 收敛速度 稳态ANSE (约) 通信频率 MEFxLMS 最快 -25 dB N/A (集中式) MGDFxLMS 快 -25 dB 每采样点 SCDMCANC 中 -23 dB 按需(所有节点同步) ACDMCANC 慢 -18 dB 按需(各节点异步)
实验2:真实录制压缩机噪声
- ANSE对比(图4(a)):趋势与实验1相似。MGDFxLMS性能接近集中式。ACDMCANC收敛速度慢于其他方法,最终稳态性能略有差距(约5dB)。
- 功率谱对比(图4(b)):展示了各方法在稳态后的降噪效果。ACDMCANC在整个频段(特别是低频)仍有明显的降噪效果,但噪声残留略高于其他方法。
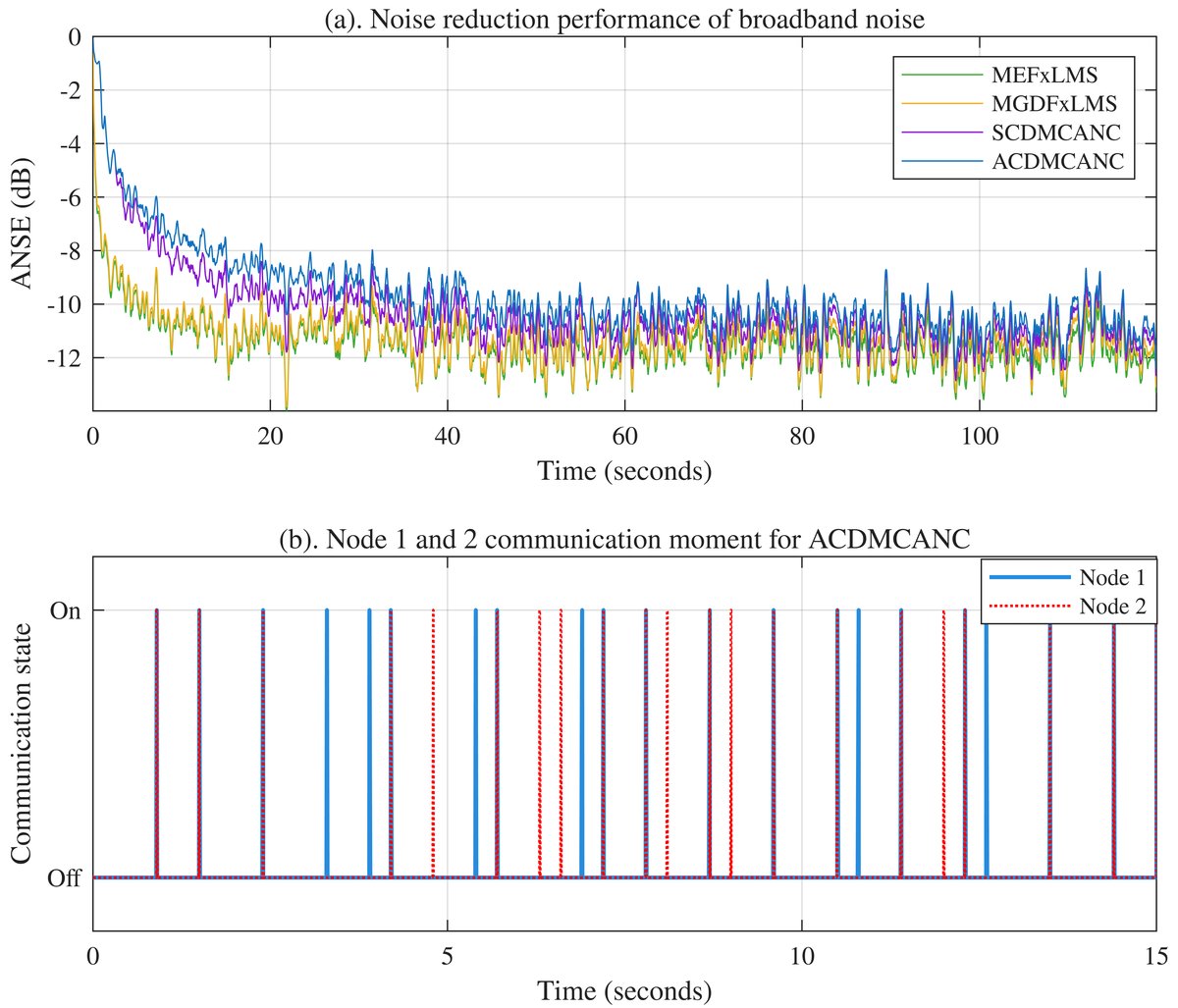 图3说明:(a) 宽带噪声下各算法ANSE对比曲线。(b) ACDMCANC系统中Node 1和Node 2在前15秒的通信实例,On/Off表示通信请求/静默。
图3说明:(a) 宽带噪声下各算法ANSE对比曲线。(b) ACDMCANC系统中Node 1和Node 2在前15秒的通信实例,On/Off表示通信请求/静默。
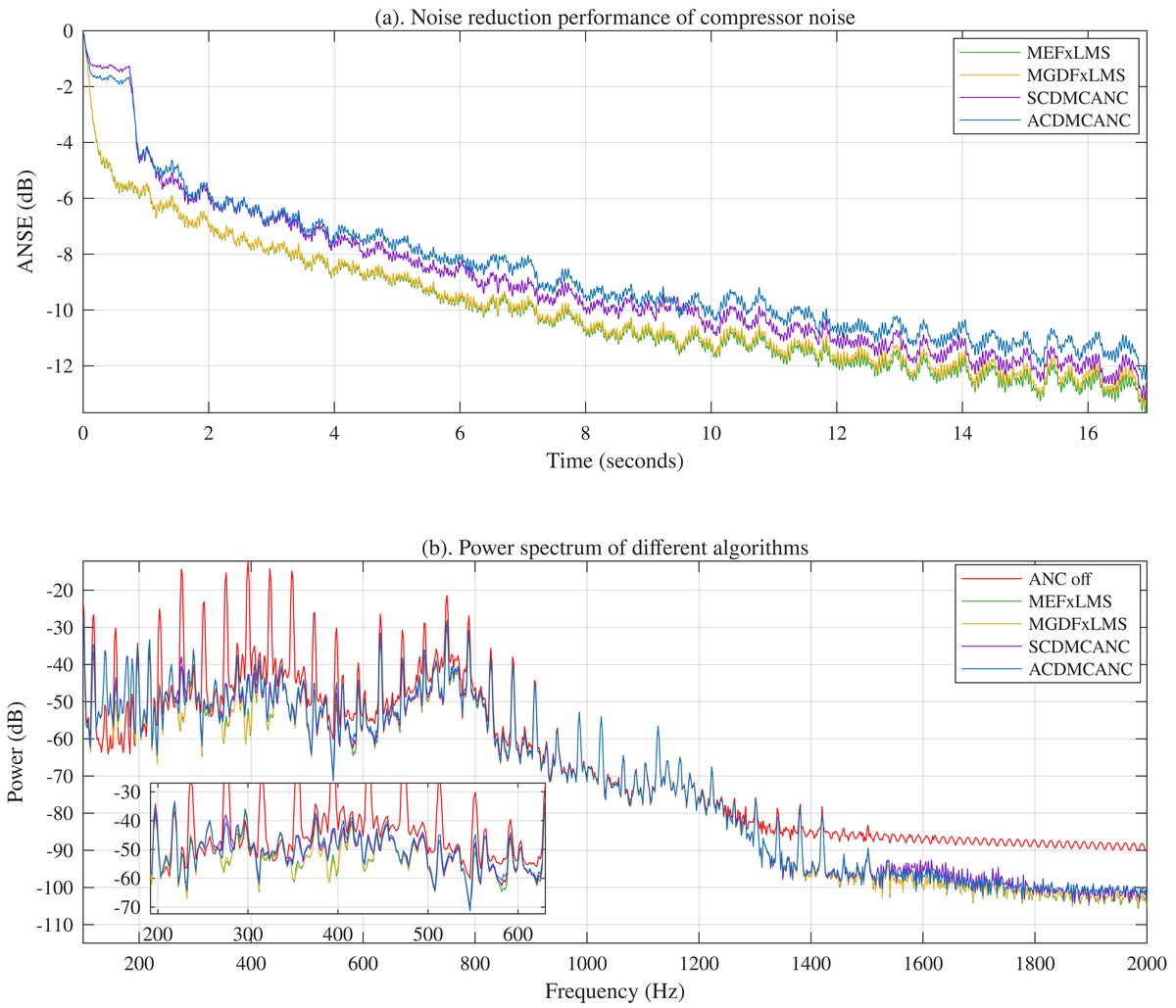 图4说明:(a) 真实压缩机噪声下各算法ANSE对比曲线。(b) 稳态时各算法降噪效果的功率谱对比。
图4说明:(a) 真实压缩机噪声下各算法ANSE对比曲线。(b) 稳态时各算法降噪效果的功率谱对比。
⚖️ 评分理由
- 学术质量:6.0/7:论文提出了一个完整且逻辑自洽的异步分布式降噪方案,技术细节清晰,仿真对比实验设计合理,结果能有效支撑其减少通信开销的主张。创新性在于对现有技术(WCFxLMS,扩散式融合)的巧妙集成与适应性改造,以解决实际工程问题(通信开销),属于扎实的系统级创新,但非基础理论突破。
- 选题价值:1.5/2:聚焦于分布式噪声控制的实际瓶颈(通信),选题有明确的应用驱动。方案对提升系统在真实网络环境中的可部署性和扩展性有直接价值。虽然领域相对垂直,但对于工业降噪、智能建筑等场景有较强相关性。
- 开源与复现加成:0.5/1:论文明确承诺在GitHub开源代码,这是重要的加分项。但论文未提供具体的代码版本、训练细节(如声学路径的具体数值)、超参数搜索过程或更详尽的复现指南,因此加成有限。